


About the Cover
Vol. 99 No. 9 (2023)
Prediction accuracy of mechanical behavior of soil structures, such as earth/rockfill dams, river levees, and embankments of reservoirs or irrigation ponds, is hardly secured, because of uncertainties in determining initial/boundary conditions and material properties for numerical simulation. In 1980s, Dr. Akira Murakami developed the Kalman filter in conjunction with the finite element method (The Kalman filter FEM) for inverse analysis to cope up with the above-mentioned uncertainties of unknown conditions and parameters by combining the numerical model with noisy measurements. The proposed method is advantageous in regularizing ill-condition by adding a regularization term to the error function in the embryotic techniques to solve an optimization problem, for example, the least square method. This pioneering work has become one of the primary methods for so-called data assimilation, practically used in various fields other than geotechnical engineering, e.g., the numerical weather prediction, and so on, triggered by appearance of nonlinear Kalman filters, such as the ensemble Kalman filter, particle filter, and unscented Kalman filter proposed around 2000.
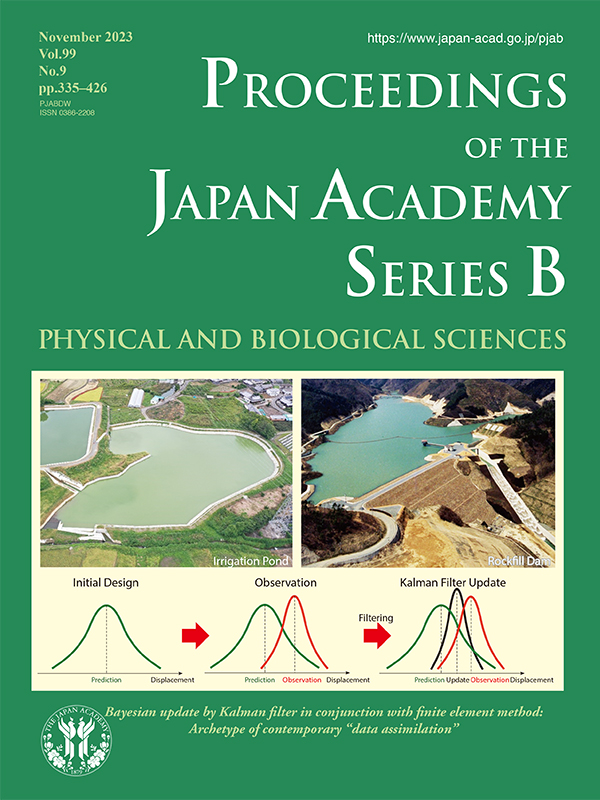
This illustration depicts the update process of a probability density function via Bayesian filtering, adopting the displacement as an example of state variables, which is described in the article by Murakami et al. (pp. 352–388) in the current issue, and presents the features of the Kalman filter FEM when applying it to the updating process for future predictions of the system behavior. The displacement is one of the typical state variables describing the mechanical behavior of soil structures, for example, embankments of dams, reservoirs, and so on. In general, every state variable is supposed to obey a probabilistic distribution due to its uncertainty. The probability distribution at the design stage is regarded as the prior probability distribution within the framework of the Bayesian statistics. When measured data for the state variable are obtained, the prior probability distribution can be updated or filtered into the posterior probability distribution based on the Kalman filter. The posterior distribution (black curve) becomes narrower than the prior one (green curve). This is a special feature of the posterior distribution, which implies that the uncertainties or noises in the state variable can be reduced and that the updated variable achieves higher accuracy for predicting the behavior of the system.
Shin-ichi Nishimura
Professor, Okayama University